
Hactenus lectio Input machinis visa est quae deprehendere vel "sensus" varias variabilium et significationum physicarum adhiberi possunt ac propterea sensores vocantur. Sed variae quoque sunt machinis electricae et electronicae quae machinis Output adsuerunt vel ad aliquem externum processum physicum regendum vel operandum. Haec machinae output vulgo Actuatores vocantur.
Actuatores signum electricum in debitam quantitatem physicam convertunt, ut motum, vim, sonum etc. Actus etiam in transductor ponitur, quia unum genus quantitatis physicae in aliud mutat et plerumque per signum mandati submissa intentione operatur vel operatur. Actuatores numerari possunt cogitationes binariae vel continuae vel secundum numerum statuum stabilium, quorum output habet.

Exempli gratia: Nulla est actuator binarius, sicut habet duos status stabiles, vel enigmata et latrata vel enervata et disiuncta, motor vero est actus continuus, quia per motum plenum 360o potest gyrari. Frequentissima genera actuatorum vel output machinae sunt electricae lumina, lumina, Motors et Loudspeakers.
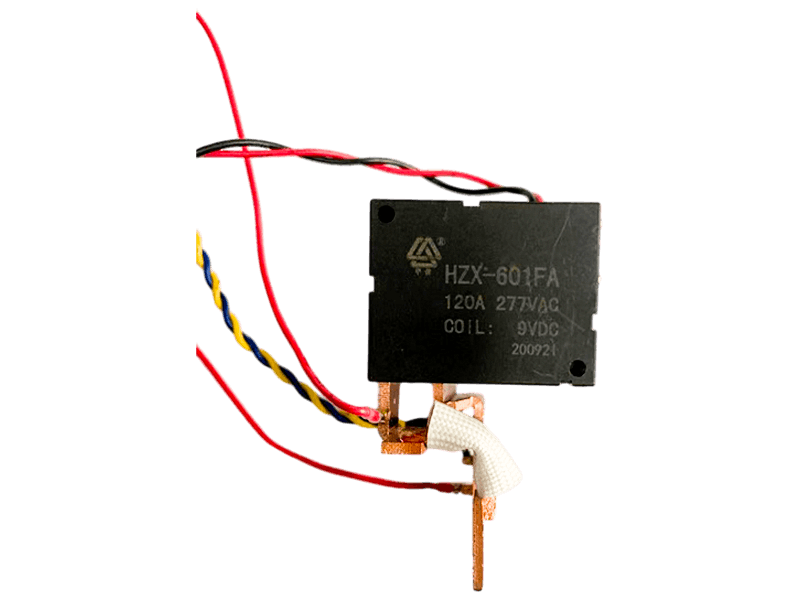
Antea vidimus solenoides posse adhiberi ad cancellos electricos apertos, ostia, valvulas apertas vel proximas, ac in variis applicationibus roboticis et mechatronicis, etc. Attamen, si solenoidorum praeceptor adhibetur ad unum vel plures copiae electricae contactus; machinam habemus "Nullam" quae tam utilis est, infinitis modis adhiberi potest, et in hoc tutorio ad Electrical Nullam inspiciemus.
Electrica Nullam dividi etiam possunt in operationes mechanicas quas vocant "Electromechanicas Nullam" et ea quae utuntur semiconductore transistores, thyristores, triaca, etc., ut eorum mutandi fabrica quae "Solida State Nullams" vel SSR's. utuntur.
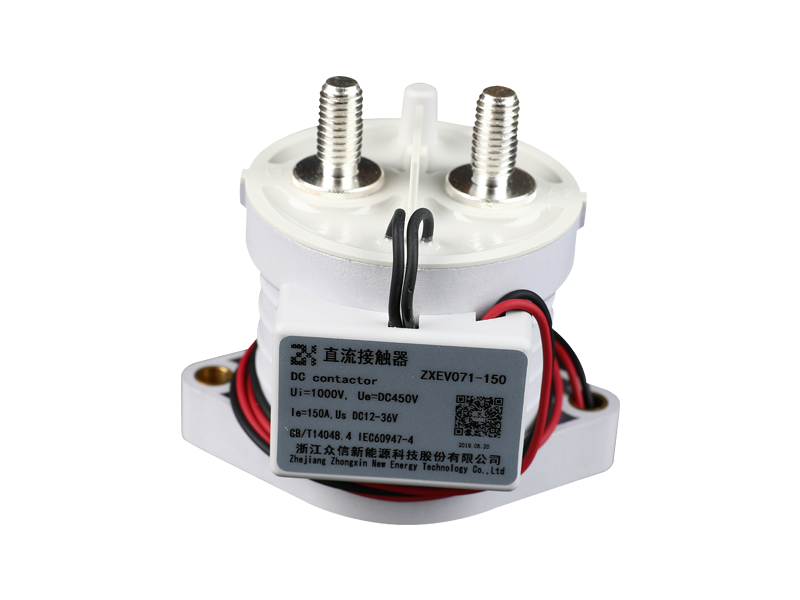






Copyright © 2015-2021, Zhejiang Zhongxin New Energy Technology Co, Ltd. All rights reserved Technical Support:dolor nubes Electromagnetic Nullam Proin Sina Nullam Factory


 Anglicus
Anglicus
